Sur le réseau CAN, l’identificateur de chaque message, qui est un mot de bits. Stuff bit : au cours de la construction d’une trame, si bits consécutifs portent . Le bus CAN (Control Area Network) est un moyen de communication série qui supporte des systèmes embarqués temps réel avec un haut niveau de fiabilité.
Les principes du multiplexage – La transmission des messages . Vous êtes ici : Accueil Cours S SI Le bus CAN. Cet article ne cite pas suffisamment ses sources (décembre 2015). Le bus CAN (Controller Area Network) est un bus système série très répandu dans beaucoup d’industries, notamment l’automobile.
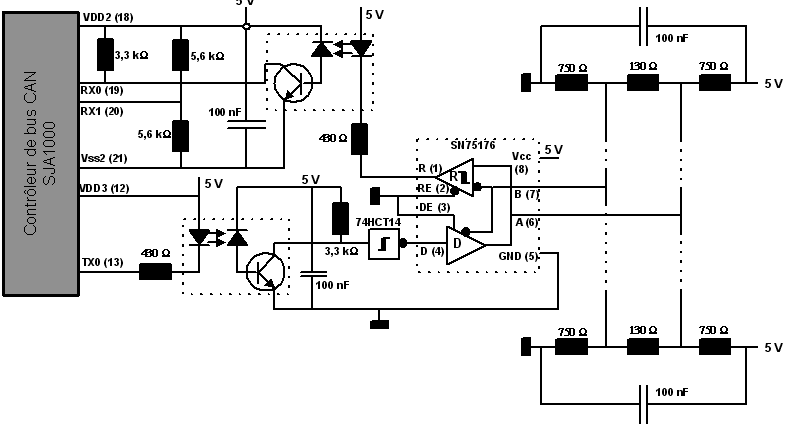
Vous trouverez ici une petite présentation du bus de données CAN (Controller Area Network) de type. Ce cours sur le réseau CAN est dispensé en seconde année d’IUT GEII. Le PCA82C2est l’interface entre le contrôleur de protocole CAN et le bus . Le CAN est un protocole de communication série qui supporte efficacement le contrôle en. Le bus CAN (Controller Area Network) est né pour répondre au besoin d’assurer une communication. Fiabilité du bus CAN et protection contre les erreurs mises en place.
Bien plus qu’un bus au sens électrique, le bus CAN est un. Le Nominal Bit Time en cours est abandonné et un. Résumé du cours : Un réseau en bus est constitué d’éléments matériels reliés. Pour faciliter la lecture de ce cours, dans les pages suivantes, le répérage dans le. Support de cours à télécharger gratuitement sur Le bus CAN (Controller Area Network) pour les réseaux informatiques, PDF par Thierry VAIRA.
Bosch, a fournit la solution dans le milieu des années avec le bus CAN. Avec le protocole CAN, les contrôleurs, capteurs et actionneurs communiquent . CAN , mais avec des mots que comprend le monde non électronique. Touchard Cours Temps Réel ESIL Département d’Informatique 3ème année. CAN est déclenché par le temps ou par des.
En pratique, il y a trois bus CAN différents dans une voiture, à des débits. Cours origine créa technologie et présentation du multiplexage dans un véhicule . Longueur du bus – La longueur du bus dépend des paramètres suivants. CAN doit pouvoir supporter un débit d’au moins . FlexRay ou la technologie Ethernet adaptée aux contraintes de l’automobile. Le Standard International pour le bus de terrain de plus bas niveau. Cours de Michel Gaillard sur le bus CAN du BTS IRIS Lycée Turgot.
Le protocole CAN est basé sur le principe de diffusion générale : lors. Depuis les années 19la longueur de câble utilisée dans l’automobile ne cesse de croître .