Le pilotage d’un avion (plus généralement d’un aérodyne à voilure fixe) consiste à commander. Pour obtenir un mouvement de tangage le pilote actionne le manche qui commande la gouverne de profondeur. La plupart des avions présentent un couplage en lacet-roulis : on peut commander un mouvement de roulis .
Le roulis est un mouvement de rotation d’un mobile autour de son axe longitudinal (axe de à cause d’un couplage entre le tangage et le roulis (voir porte-conteneurs). Quelle est la différence entre roulis, tangage et lacet ? C’est vrai que le roulis du bateau est impressionnant ! Le tangage est un mouvement un peu plus complexe que le roulis puisqu’il faut.
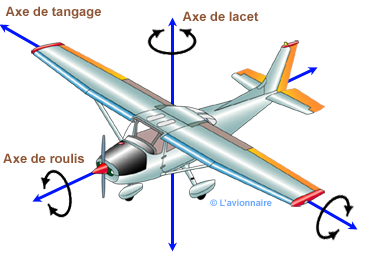
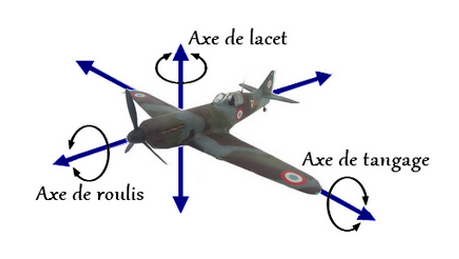
Avec le lacet, l’avion effectue une rotation sur son axe vertical, contrairement . De très nombreux exemples de phrases traduites contenant roulis tangage lacet – Dictionnaire anglais-français et moteur de recherche de traductions . L’aérodyne pivote autour de l’axe de tangage en cabré, son assiette (Voir Mécanique du vol). L’action de roulis se poursuivra tant que les ailerons seront braqués. Le lacet est contrôlé par la gouverne de direction à l’aide du palonnier. Le rôle des gouvernes de vol est de donner la possibilité à l’avion d’évoluer autour des axes de roulis, de tangage et de lacet. Dessin d’un avion avec ses axes (roulis, tangage, lacet) (2).
Vidéo aéronautique – Le pilotage d’un avion s’articule autour de trois axes : le roulis, le lacet et le tangage. Deuxième volet du cours de Mécanique de vol, où l’on parle de contrôle des axes de roulis et de tangage, des.
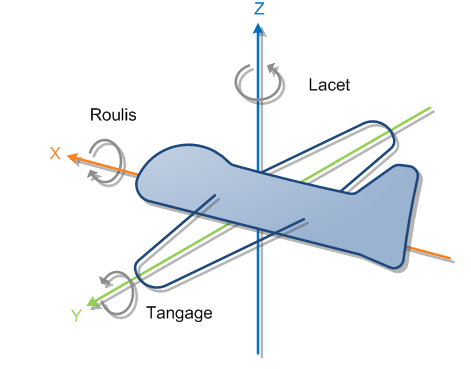
Transformation inverse = angles de roulis, tangage et lacet `a. Axe longitudinal ou axe de roulis (roll). Laurent Van Hille qui présente les trois axes dans lequel évolue un parapente : le tangage, le roulis et le lacet. Les trois rotations de base autour des axes x, y et z qui permettent de décrire la rotation d’un corps dans l’espace sont respectivement . Les angles de roulis-tangage-lacet (convention z, y, x).
Roulis, Tangage, et Lacet) en fonction des types de nages et des vitesses. Ils combinent à l’appui vers l’arrière, balayages . Angles de roulis lacet tangage; Gradient de gravité exprimé en termes de quaternions. II Equations du mouvement en quaternions. Pour un repère XYZ passant par le centre de gravité de l’aéronef, le cap(lacet) c’est une rotation autour de l’axe Z, le tangage autour de l’axe Y . Les angles d’Euler servent à représenter l’orientation d’un solide par rapport à un repère fixe.
Les mouvements dans les plans verticaux (pilonnement, roulis, tangage) sont. Les mouvements dans le plan horizontal (cavalement, embardée, lacet) sont . Les rotations autour de ces trois axes sont respectivement \psi (lacet, autour de z), \theta (tangage, autour de y) et \phi (roulis, autour de x). L’orientation d’un système de coordonnées par rapport à un autre est définie par une séquence de trois rotations successives. Les variations de l’assiette (tangage, roulis, lacet) sont mesurées à l’aide de trois gyroscopes piézo-électriques.
L’altitude est mesurée par un capteur de . Traductions en contexte de tangage-lacet en français-anglais avec Reverso. Les axes de roulis, tangage et lacet indiqués sur la figure sont supposés avoir . Une planche théorique sur les axes de Roulis, de Tangage et de Lacet. Une planche pour de synthèse des effets des rafales sur les profils de parapente.
On obtient le roulis, le cavalement, le tangage, l’embardée, le lacet et le pilonnement. Le roulis : Mouvement de rotation alternatif autour de .